Environments
VirtualHome is composed of 50 custom designed environmenta where activities can be executed. Each environment is encoded as a dictionary, containing a node for every object and edges between them representing relationships. Each environment can be updated by modifying the corresponding dictionary. We call this dictionary EnvironmentGraph.
You can load each environment using unity_simulator.UnityCommunication.reset() function, specifying the matching environment id. You can retrieve the information of an environment using unity_simulator.UnityCommunication.environment_graph(). After loading an environment, you can modify it using unity_simulator.UnityCommunication.expand_scene().
Environments
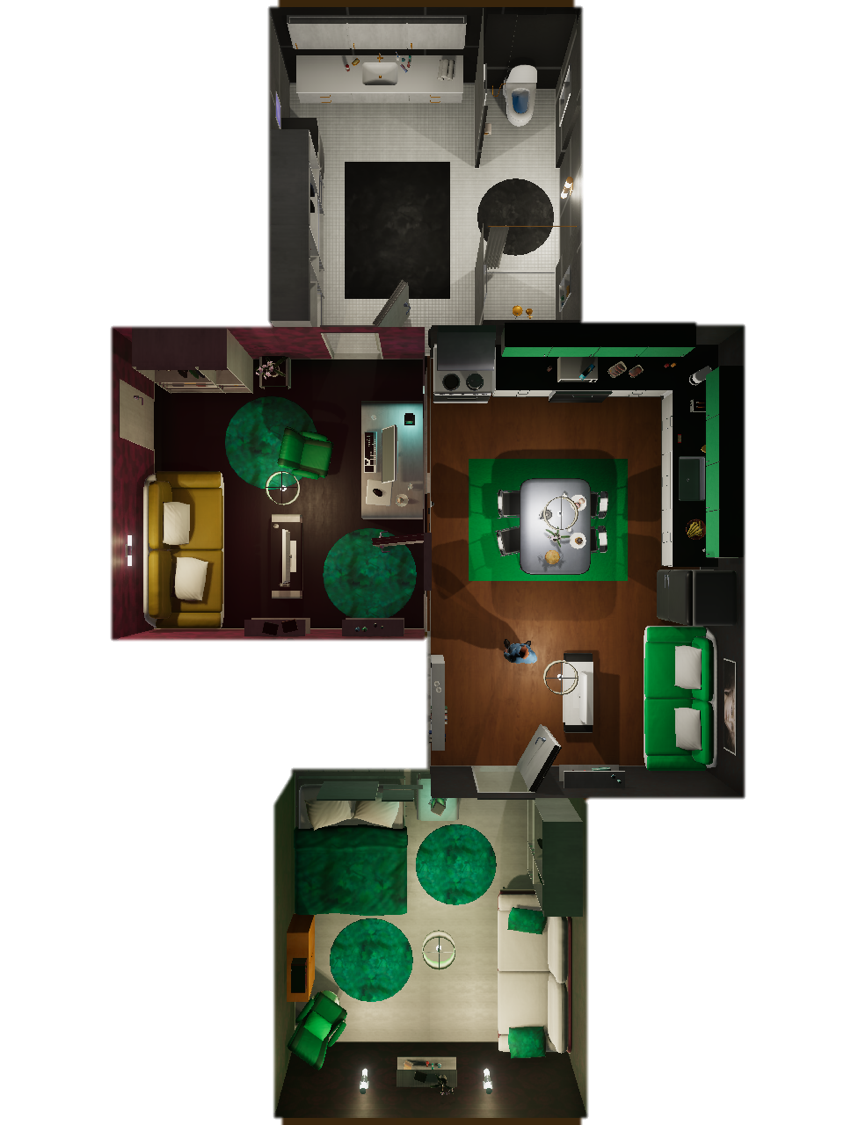
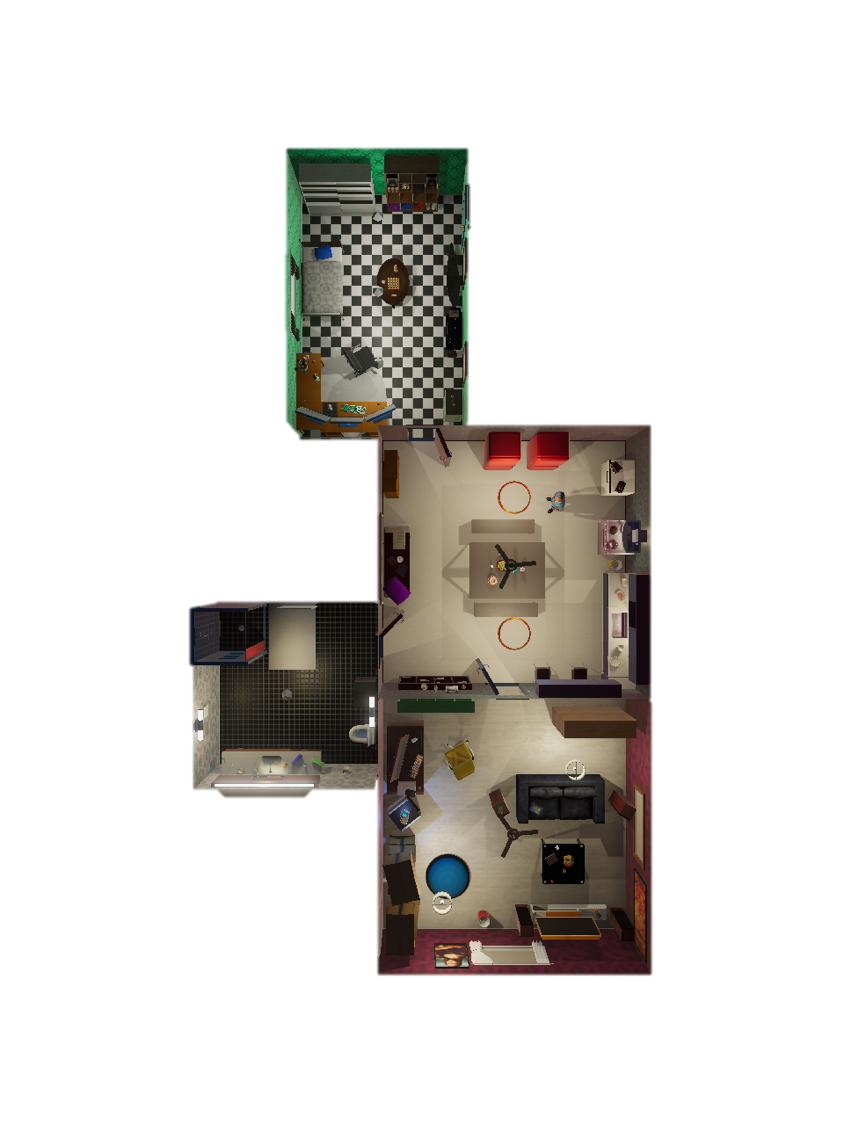
Below are a few samples of the environments included in VirtualHome.
Environment ID |
Apartment View |
|---|---|
0 |

|
1 |

|
2 |

|
3 |

|
4 |
|
5 |

|
6 |
|
Environment Graph
The Environment Graph is the way to represent a environment in VirtualHome. It is represented as a dictionary of node, corresponding to objects, and edges, corresponding to relationships.
Here is an example:
{
"nodes":[
{
"id":1,
"class_name":"character",
"states":[
],
"properties":[
],
"category":"Person"
},
{
"id":2,
"class_name":"kitchen",
"states":[
],
"properties":[
],
"category":"Room"
}
],
"edges":[
{
"from_id":1,
"to_id":2,
"relation_type":"INSIDE"
}
]
}
The structure of the Graph is documented below.
Environment Graph
- EnvironmentGraph
- Nodes
- Object Properties
id (int) – id of object
class_name (str) – class_name of the object
category (str) – cateogry of the object
prefab_name (str) – name of the Unity game object used
states (list(str)) – states of the objects
properties (list(str)) – properties of the objects
bounding_box (list(
BoundingBox)) – bounding box of the given objectobj_transform (
ObjTransform) – 3D information of the given object
- BoundingBox
- Object Properties
center (list(float)) – center of the bounding box, in x,y,z
size (list(float)) – size of the bounding box, in x,y,z. The size is axis aligned
- ObjTransform
- Object Properties
position (list(float)) – x,y,z position of the game object. Does not necessarily match with BoundingBox center.
rotation (list(float)) – x,y,z,w representation a quaternion of the object rotation https://docs.unity3d.com/ScriptReference/Quaternion.html
States
Objects can have the following states
State |
Meaning |
|---|---|
OPEN |
Indicates whether a container is open. |
CLOSED |
Indicates whether a container is closed. |
ON |
Indicates whether a light, electronic device is ON. |
OFF |
Indicates whether a light, electronic device is OFF. |
Properties
Objects can have the following properties. Some have effect on the Uniy Simulator and some are just used to categorize the objects. We only indicate meaning for the former.
Property |
Meaning |
|---|---|
CAN_OPEN |
Whether the object can be opened |
CLOTHES |
|
CONTAINERS |
|
COVER_OBJECT |
|
CREAM |
|
CUTTABLE |
|
DRINKABLE |
|
EATABLE |
|
GRABBABLE |
Whether the object can be grabbed |
HANGABLE |
|
HAS_PAPER |
|
HAS_PLUG |
|
HAS_SWITCH |
Whether the object can be turned on or off |
LIEABLE |
|
LOOKABLE |
|
MOVABLE |
|
POURABLE |
|
READABLE |
|
RECIPIENT |
|
SITTABLE |
Whether the agent can sit in this object |
SURFACE |
Whether the agent can place things on this object |
Relationships
Objects can have different relationships between each other, we describe here their meaning
Relation Type |
Meaning |
|---|---|
ON |
Object from_id is on top of object to_id. |
INSIDE |
Object from_id is inside of object to_id. |
BETWEEN |
Used for doors. Door connects with room to_id. |
CLOSE |
Object from_id is close to object to_id (< 1.5 metres). |
FACING |
Object to_id is visible from objects from_id and distance is < 5 metres. If object1 is a sofa or a chair it should also be turned towards object2. |
HOLDS_RH |
Character from_id holds object to_id with the right hand. |
HOLDS_LH |
Character from_id holds object to_id with the left hand. |
SITTING |
Character from_id is sitting in object to_id. |
Environmental Manipulation
VirtualHome also supports environmental manipulation. The current supported features are to set the time to a pre defined state which accurate day/night lighting, and physics where objects in the environment experience gravity with semi-accurate collisions. To set the time you can call the comm.set_time() function and to activate gravity in the environment the comm.activate_physics() function can be called.
Set Time
The following example shows how to set the time in the environment:
# Set the time of the environment using hours, minutes and seconds
comm.set_time(hours=0, minutes=0, seconds=0, scaler=1)
set_time
The time of the environment will be set to accurately display lightning and corresponding actions which can be simulated depending on the time.
- Arguments
hours,minutes,seconds- Modifier
- Preconditions
Environment has to be in a active state
- Postconditions
The time will be set for the environment and outside lighting will be affected by the time.
- Example
comm.set_time(hours=6, minutes=30, seconds=0)
Activate Physics
The following example shows how to activate physics:
# Activate physics (gravity)
comm.activate_physics()
activate_physics
All interactble objects can be influenced by gravity and collisions.
- Arguments
gravity- Modifier
- Preconditions
Environment has to be in a active state
- Postconditions
All interactble objects expereince gravatational force and can represent semi-acccurate collisions
- Example
comm.activate_physics(gravity=-10)
Remove Terrain
The following example shows how to remove the outdoor terrain:
# Remove terrain
comm.remove_terrain()
remove_terrain
All outdoor objects will be removed.
- Arguments
none- Modifier
- Preconditions
Environment has to be in a active state
- Postconditions
Outdoor terrain is removed
- Example
comm.remove_terrain()